Für die Roboterwettbewerbe verwenden wir im Moment SmartPhones als Fernsteuerung. Das ist für zu Hause cool, aber für öffentliche Veranstaltungen weniger geeignet. Deswegen wollen wir coole Tasten bauen.
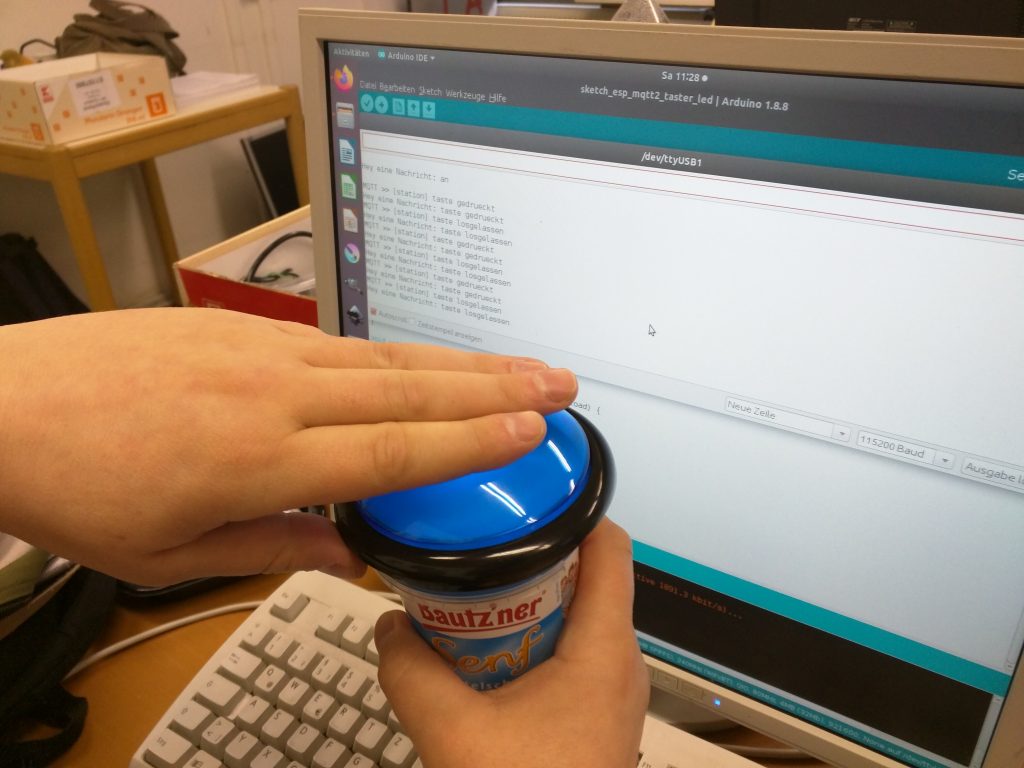
Die Grundlage bilden Arcade Buttons für Spielautomaten. Die Variante mit 60mm bzw. 100mm Breite passt hervorragend auf „Bautz’ner Senf“ Dosen. Dafür haben wir den Sommer über fleissig Senf gegessen. Aber wahrscheinlich nicht genug, denn es fehlen noch welche 🙂
Status des Projekts
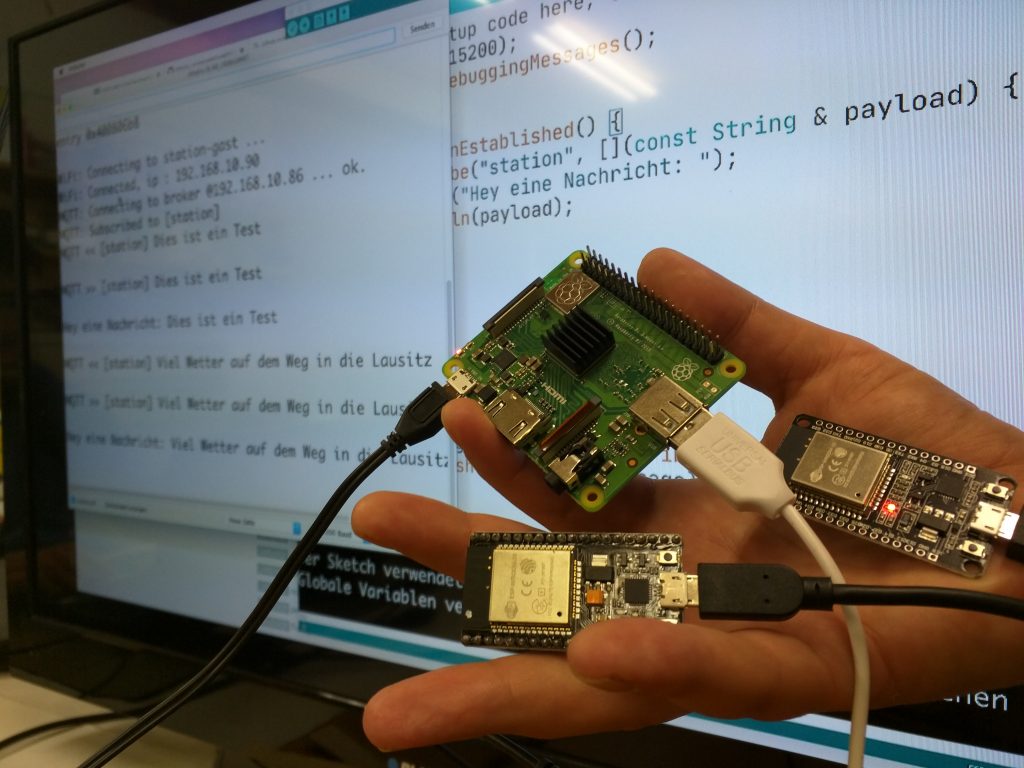
- [08.02.2020] 10 Lademodule mit Schiebeschalter und 6 Tasten inklusive ESP32 sind fertig. Als Kommunikationsvermittler dient ein Raspberry Pi 3A+ mit WLAN-AccessPoint und mosquitto MQTT Broker. Die Tasten haben eigene Namen und berichten über MQTT, wenn die Taste gedrück wurde. Auch die LED lässt sich schon via MQTT aus der Ferne schalten. Die Vorwiderstände sind aber noch nicht angepasst und so sind die Tasten nicht hell genug.
- [26.01.2020] Die gelieferten Tasten sind doch 10cm statt 6cm groß. Passt trotzdem hervorragend, auch auf die Deckel-Seite der Dose. Ein Modul aus LiIon-Akku, Laderegler und Mini ESP32 läuft schon.
- [23.01.2020] Das Material ist größtenteils angekommen, so dass wir einen ersten Prototypen zusammenstellen können. Es müsste möglich sein, die Taste auf den Deckel zu bauen, so dass die Dose richtig rum stehen kann.
- [11.01.2020] Das Material für 10 Tasten ist bestellt. Im Februar müsste alles in der Werkstatt angekommen sein und dann werden wir weiter sehen.
Im Detail

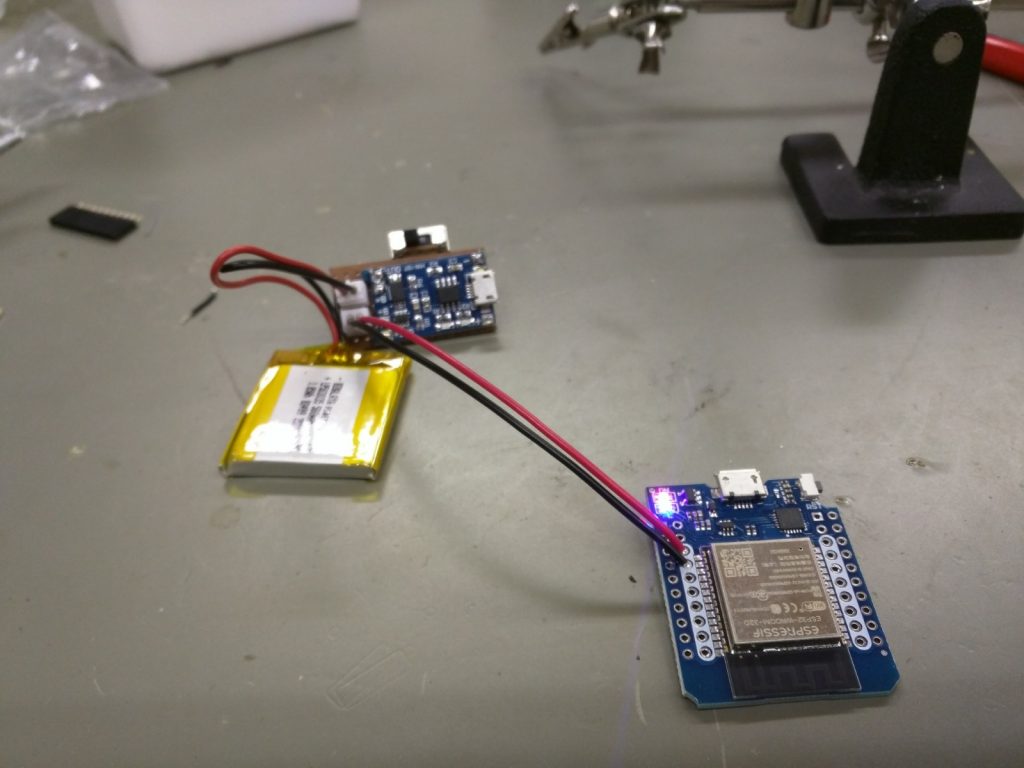
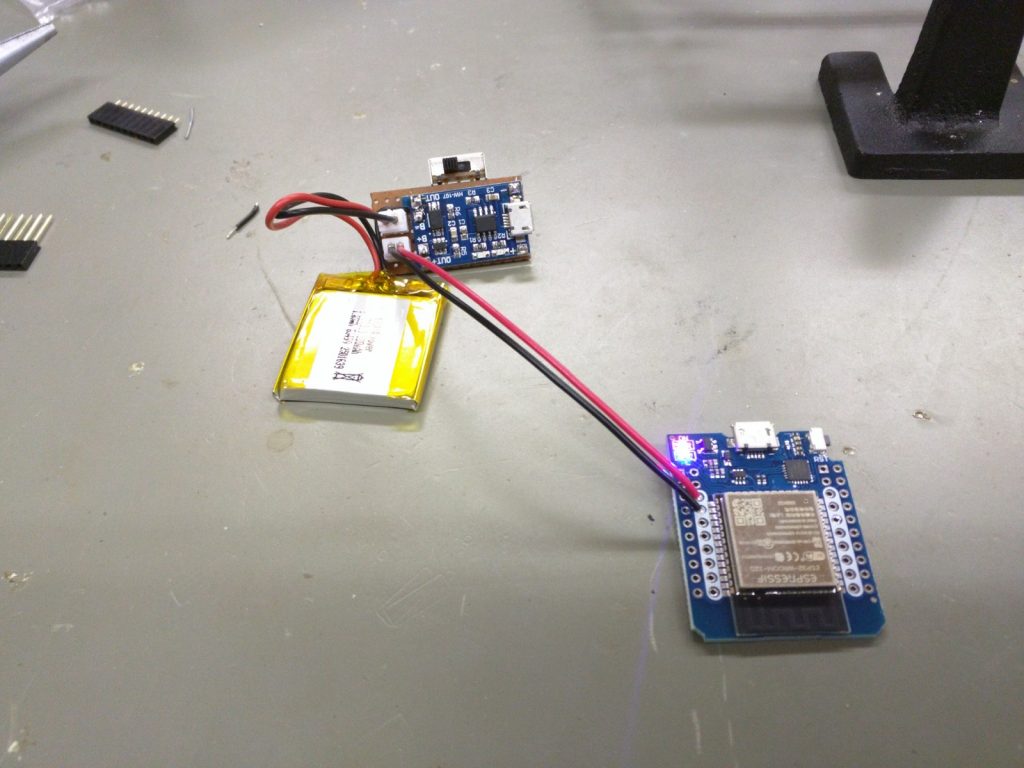
Bisher haben wir diese Taster mit einem Kabel versehen, so dass sie an Arduinos und Steckbrett-Minicomputer angeschlossen werden können für Programmierkurse. Die neue Version besitzt einen 450mAh LiPo Akku, ein dazu angepasstes Lademodul, sowie einen ESP32 Mikrocontroller im kompakten „Wemos D1“ Format. Das müsste eigentlich locker Platz finden in der Senfdose. Der ESP32 wird sich dann via WiFi mit einem Raspberry Pi verbinden.
Über das WLAN wird dann mittels MQTT Protokoll übertragen, wenn die Taste gedrückt bzw. losgelassen wurde. Die eigentliche Steuersoftware läuft auf dem Raspberry Pi und hält ebenso Kontakt mit den Robotern. Ihre Aufgabe wird es sein, die Tasten-Ereignisse in Steuerbefehle für die Roboter zu übersetzen.
Der Clou an dem Aufbau ist, dass die Tasten einfach weitergegeben werden können weil sie kabellos sind. Und die Steuersoftware auf dem Raspberry Pi kann die Zuordnung der Tasten zu Robotern und Funktionen „dynamisch“ anpassen, was sicherlich ein großer Spaß für die Teams sein wird, hehe…
Die ESP32 gibt es in einer minimalen Ausführung unter dem Namen „Wemos MiniESP32“. Beim Einkauf muss man aufpassen, nicht den alten ESP8266 zu erwischen. Zuweilen werden auch alte ESP8266 Module zusammen mit einem neuen ESP32 Chip angeboten. Ob das passt, wollten wir nicht ausprobieren.
Die Deckel der Dosen haben mit Hilfe eines Forstnerbohrers eine 25mm Bohrung bekommen. Dort lassen sich die Arcade Buttons super einschrauben. Vielen Dank an Emil für den Bohrer!
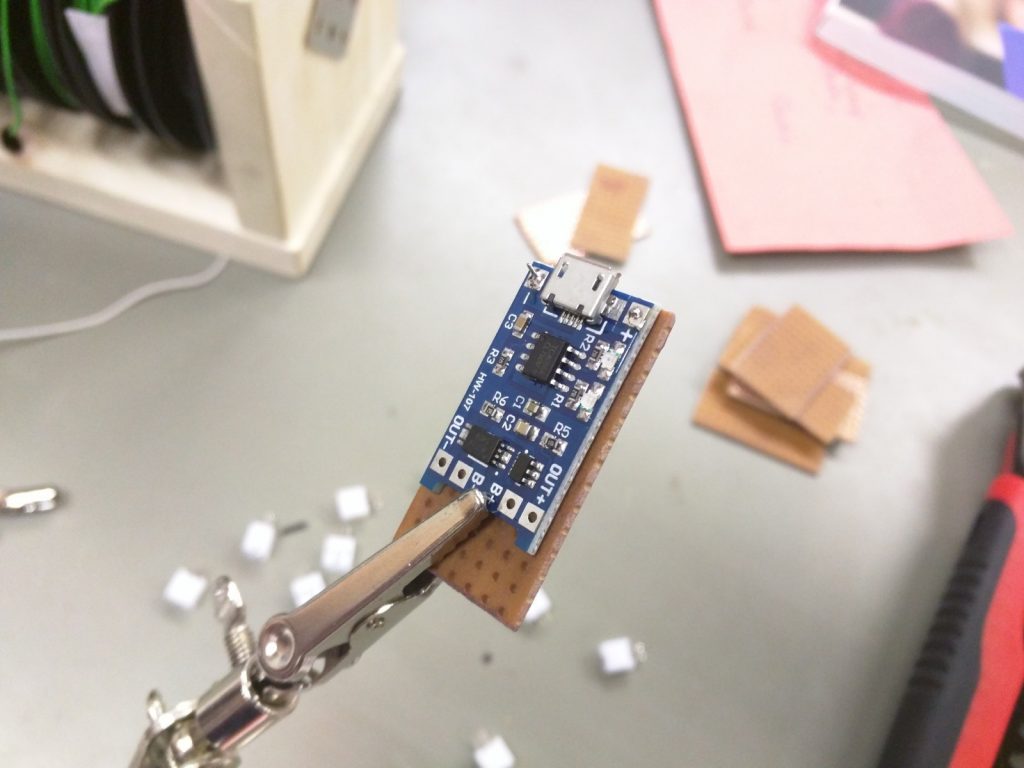
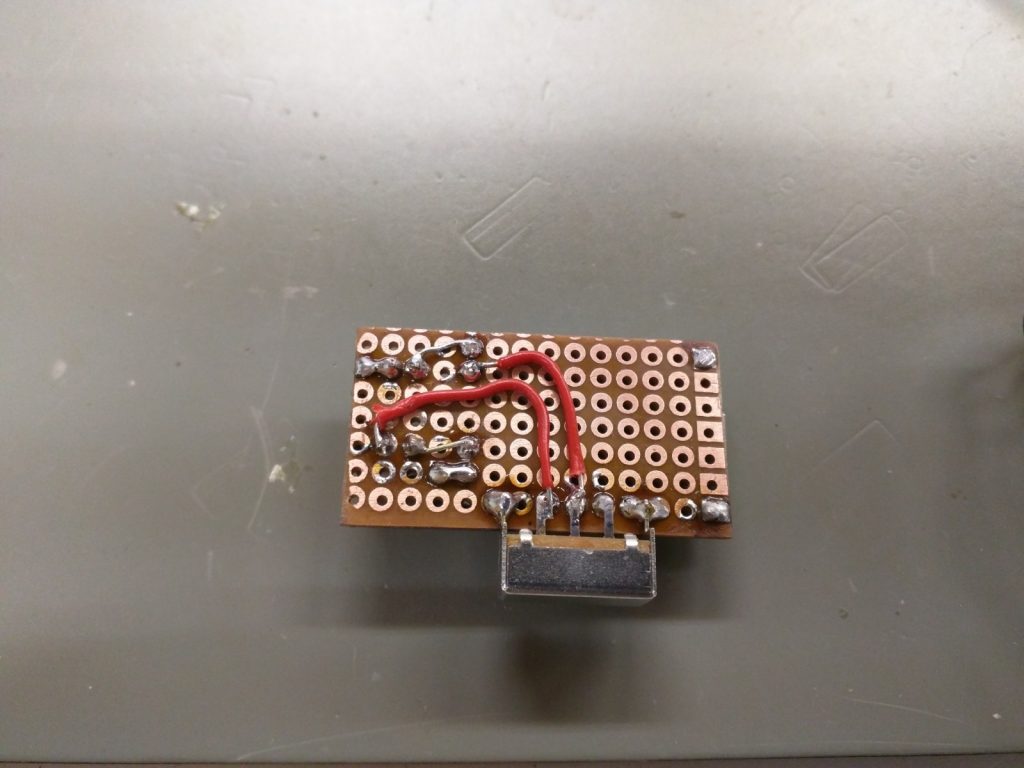
Die Batterielademodule haben wir auf eine Lochrasterplatte gelötet. Das ist leider nicht so einfach, weil die Löcher nicht auf dem 2,54mm Raster sind. Also zuerst alle Drähte durchfädeln und am Modul festlöten, dann mit einer Zange fester an die Lochrasterplatine ziehen und festlöten. Die Lochrasterplatine hat einen Schiebeschalter bekommen zwischen dem Plus-Pol der Batterie und dem Lademodul. Eine zweite Buchse verbindet den Ausgang des Ladereglers mit VCC und GND auf dem ESP32. Die Buchse hätten wir vielleicht auf den ESP32 löten sollen, weil es dann keine Verwechslungsmöglichkeiten gibt.